腾讯首席科学家、Robotics X实验室主任、福田实验室主任张正友在演讲时指出,当前具身智能面临“身与智割裂”的问题,即强行将无世界认知的AI嵌入机器人,难以实现真正的自主交互,具身智能应实现“身”与“智”的动态协同进化,让机器人在与环境持续闭环交互中不断提升能力,最终实现真正的具身智能。

具身智能的定义与技术背景
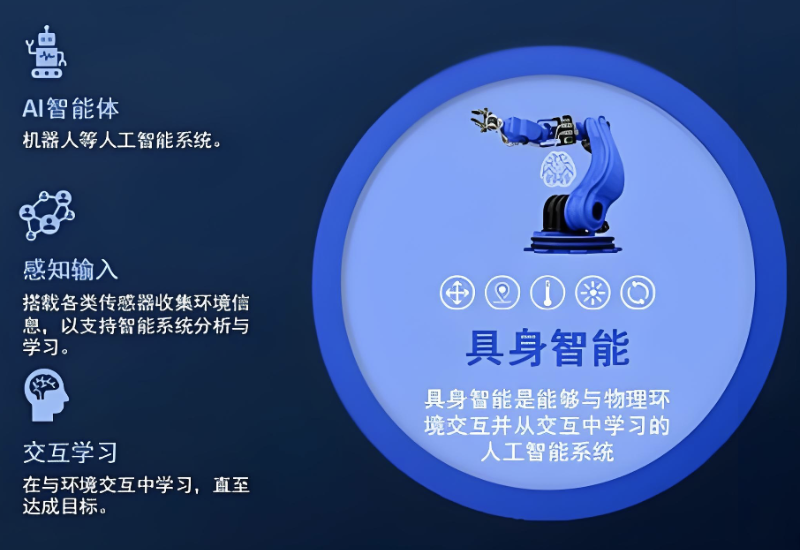
具身智能是指拥有物理或虚拟身体的智能体,能够通过主动感知、规划和控制改变现实世界,并基于反馈调整策略,是多学科交叉的产物,涵盖机械工程、自动化、人工智能、认知科学等。随着相关技术成熟,具身智能近年来开始进入大众视野。
具身智能的技术趋势
张正友分析了当前具身智能的几大技术趋势:
1. 计算平台连续化、个人化:从大型机到可穿戴设备、AI眼镜、机器人。
2. 感知技术多模态化:从被动单一信息转向主动、个性化、多模态感知。
3. 人机交互平民化:自然语言交互降低门槛,未来将实现多感官交互。
4. 虚实融合深化:数字世界与现实世界的界限日益模糊。
AI系统的三代演进:从搜索引擎到智能体
张正友将AI系统划分为三代:
第一代:被动返回链接的搜索引擎;
第二代:生成式AI(如ChatGPT);
第三代:交互式AI(智能体),具备自主感知、决策、行动、学习和协作能力。
他强调,智能体具有记忆连续性、认知全息性和进化内生性三大优势,未来潜力巨大。
SLAP³范式:打通“看见”与“做到”的关键环节
为应对反应式智能的挑战,张正友于2018年提出SLAP范式,后演进为SLAP³,其核心是构建“左脑”(规划大模型)、“右脑”(多模态感知模型)、“小脑”(感知行动联合模型)的分工协作机制。该范式实现了从感知到执行的闭环,提升了机器人对复杂任务的处理能力。
Tairos平台演示:大模型与机器人本体结合
张正友展示了其主导开发的Tairos平台,该平台实现了大模型能力与机器人本体的结合,完成从任务分解到执行的闭环流程。该平台已应用于宇树机器人G1,展现出强大的交互与执行能力。

具身智能面临的挑战与机遇
张正友指出,具身智能仍需突破以下挑战:
1. 深化虚实融合,构建精准物理模型;
2. 提升通用泛化能力,强化记忆管理与人格化塑造;
3. 完善多模态感知,整合嗅觉、味觉等维度;
4. 降低技术门槛,推动平台化工具普及。
他呼吁更多开发者参与,共同探索具身智能的无限可能。
关注老龄化:机器人如何助力社会需求
张正友特别关注机器人在应对老龄化方面的应用。他以团队设计的轮足融合机器人“小五”为例,展示如何通过形态优化提升效率与适应性。机器人本质是“为人类服务的苦力”,形态应基于功能与效率,而非拘泥于仿生。
回归机器人本质:超越仿生,拥抱多元形态
张正友强调,“Robot”源自捷克语“Forced Labor”,意为“苦力”。他认为,机器人不等于人形机器人,形态应服务于功能,可以借鉴人类优势,也可以探索多种模态。他引用唐代智通大师语:“身智融无碍,应物任随形”,表达对具身智能理想状态的期待。
从“身智割裂”走向“身智融合”,是具身智能发展的必经之路。张正友的演讲不仅揭示了当前技术趋势,也为未来AI与机器人融合指明方向。随着技术不断进步,具身智能或将重塑人与机器的关系,开启智能时代的新篇章。
-

美东时间周一,围绕美国建国250周年的消费让利活动传出不同视
-

经济合作与发展组织(OECD)近日发布2025年成员国居民收
-

2026年7月消息,继英国正式通过烟草限购法案之后,法国也公
-

高盛全球经济研究团队负责人约瑟夫·布里格斯最新发布的研判显示
-

硅谷用不到三年将AI推成万亿美元级产业赛道,却在当下撞上了比
-

立案核心信息本次调查由巴斯夫、科思创、壳牌等欧盟本土头部化